Tornamesa

La mascota Robótica
El reto:
1. Transformar el móvil que hemos utilizado durante las semanas anteriores implementando el tornamesa con un tercer motor en una mascota que al azar realiza una de las siguientes acciones: mueve su cabeza, avanza, retrocede o gira; cada vez que se le aplaude o habla con cariño.
2. El programa debe incluir el brazo de programación con el sensor de sonido y el brazo del programa con la lectura del sensor de sonido.
La descripción
- Tipo de animal que simula: El lindo gatito llamado "glass"
- Funcionamiento: Este modelo consta de tres motores, donde B y C hace caminar o retrocede a la mascota, el C es el que representa la tornamesa que hacer mover su cabeza lateralmente y fue construido con un tornillo sin fin. Con el ultrasonico cuando el dueño lo llama y llega la mascota gira de alegría.
- Sensores empleados: Sonido y ultrasonico.
- conductas representadas: Camina, retrocede, hacer un ruido, gira.

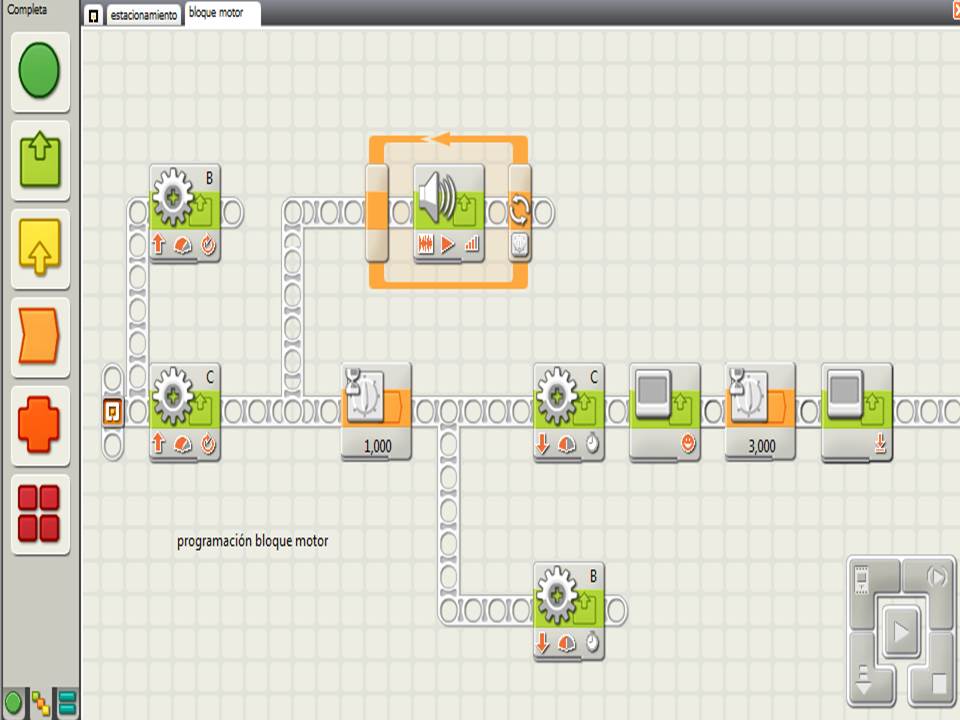
Imagen del programa final de NXT-G diseñado para el control del robot

Video con el funcionamiento